
오늘날 로봇 공학은 기술 분야에서 가장 발전된 기술 중 하나가되고 있습니다. 그만큼 로봇 공학의 응용 주로 자동차, 의료, 건설, 국방에 관여하고 또한 소방 로봇 화재 사고에서 사람들을 돕기 위해. 그러나 리모컨이나 스위치로 로봇을 제어하는 것은 매우 복잡합니다. 따라서 가속도계 기반 제스처 제어 로봇이라는 새로운 프로젝트가 개발되었습니다. 이 프로젝트의 주요 목표는 가속도계를 사용하여 손 제스처로 로봇의 움직임을 제어하는 것입니다.

가속도계 기반 제스처 제어 로봇
가속도계 기반 제스처 제어 로봇
이 프로젝트에는 송신기 섹션과 수신기 섹션이 포함됩니다. 그만큼 필수 구성 요소 이 프로젝트를 구축하기 위해 Ht12e, Ht12d, L293D, AT89S52, 7805, 커패시터, 크리스탈, PBT 커넥터, 단극 안테나, 저항기, LED, 가속도계 및 배터리가 있으며 가속도계는이 프로젝트의 필수 장치입니다.
가속도계 또는 송신기 장치는 손 제스처에 따라 다릅니다. 송신기 장치를 통해 명령이 수신되고 At89S51 마이크로 컨트롤러의 도움으로 처리됩니다. 이 마이크로 컨트롤러 제공 원하는 방향으로 움직 이도록 로봇에 신호를 보냅니다. 이 로봇의 기본 작동 원리는 로봇에 장착 된 마이크로 컨트롤러로 장치 판독 값을 전송하는 데이터 신호 세트입니다. 사전 프로그래밍 된 마이크로 컨트롤러는 프로그램에 따라 실행되어 그에 따라 로봇이 작동합니다.
가속도계를 이용한 제스처 제어 로봇은 가속도계를 올려 놓고 손의 움직임으로 조작 할 수있는 로봇이다. 이 프로젝트는 송신기 장치와 수신기 장치의 두 부분으로 나뉩니다. 제스처 장치가 송신기 장치로 작동하고 로봇이 수신기 장치로 작동하는 경우 전송 장치 (가속도계)를 손에 얹으면 로봇에 필요한 작업을위한 신호를 보냅니다.
전송 섹션에 사용되는 주요 구성 요소에는 가속도계, 비교기, HT12E IC 인코더 및 RF 송신기 .
가속도계
가속도계는 하나입니다 센서 유형 X, Y, Z 방향으로 이동하면서 아날로그 데이터를 제공합니다. 이러한 방향은 센서 유형에 따라 다릅니다. 가속도계의 다이어그램은 다음과 같습니다. 이 센서는 화살표 방향으로 구성되어 있습니다. 센서를 한 방향으로 기울이면 특정 핀의 데이터가 아날로그 형태로 변경됩니다. 가속도계는 6 개의 핀으로 구성됩니다. 각 핀의 기능 아래에서 설명합니다.

가속도계
- 핀 -1 : VDD 핀은이 핀에 + 5V 전원을 공급하는 데 사용됩니다.
- 핀 -2 : GND 핀은 바이어스를 위해 접지에 연결됩니다.
- 핀 -3 : X 핀은 X 방향으로 데이터를 수신합니다.
- 핀 -4 : Y 핀은 Y 방향으로 데이터를 수신합니다.
- 핀 -5 : Z 핀은 Z 방향으로 데이터를 수신합니다.
- 핀 -6 : ST 핀은 가속도계 1.5g 또는 2g 또는 3g 또는 4g의 감도를 조정하는 데 사용됩니다.
비교기
비교기는 아날로그 전압을 디지털 전압으로 변경하고 해당 아날로그 전압을 기준 전압과 비교하여 정확한 저전압 또는 고전압을 제공하는 데 사용됩니다.
인코더
이 인코더는 4 비트 데이터를 인코딩하는 데 사용되며 RF 송신기 모듈을 사용하여 전송합니다.
RF 송신기 모듈
RF TX 모듈은 433MHz 주파수에서 작동하며이 모듈은 저렴한 비용으로 시장에서 쉽게 구할 수 있습니다.
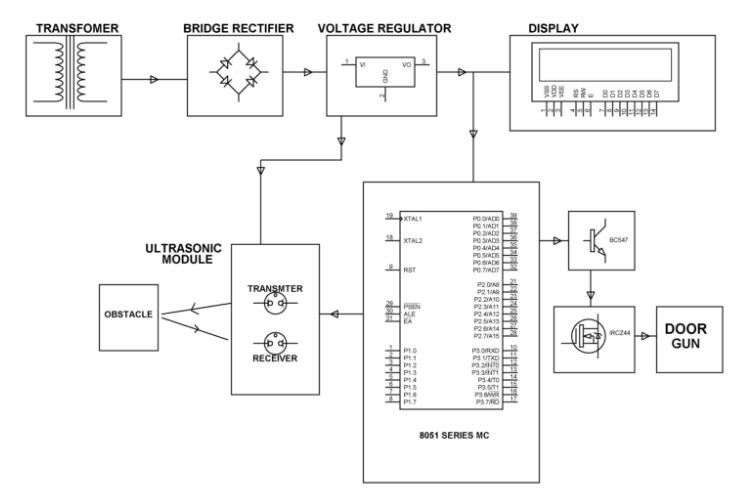
수신 섹션에서 사용되는 주요 구성 요소에는 수신기, 디코더, 마이크로 컨트롤러 및 모터 드라이버가 포함됩니다.

송신기 섹션
RF 수신기
이 프로젝트의 RF 수신기는 전송 장치가 전송 한 데이터를 수신합니다.
디코더
디코더는 직렬 데이터를 RF 수신기 모듈에서 수신 한 병렬 데이터로 변경하는 데 사용됩니다.
마이크로 컨트롤러
그만큼 마이크로 컨트롤러는 가장 필수적인 부분입니다. 로봇의. 8051 제품군 마이크로 컨트롤러가 회로에 사용되어 결정 용량을 제공합니다.
모터 드라이버
모터 드라이버는 모터와 같은 작업을 수행하기 위해 움직임을주는 장치입니다. 따라서 컨트롤러를 통해 실행하려면 모터 드라이버가 필요합니다. 모터와 마이크로 컨트롤러 간의 인터페이스는이 회로에서 L293D 모터 드라이버 IC를 사용하여 수행 할 수 있습니다.
수신기 섹션에서 RF 수신기 모듈은 송신기로부터 데이터를 수신합니다. 수신 된 데이터는 IC HT12D로 디코딩 할 수 있습니다. 수신 된 데이터는 AT89S51 마이크로 컨트롤러로 처리 할 수 있으며 모터 드라이버는 모터를 제어하는 데 사용됩니다.

수신기 섹션
제스처 제어 로봇 작업
가속도계 기반 제스처 제어 로봇은 가속도계를 손에 놓을 때 손의 움직임에 따라 움직입니다. 로봇 앞에서 가속도계로 손을 기울이면 로봇은 다음 움직임이 주어질 때까지 앞으로 움직이기 시작합니다. 손을 뒤로 기울이면 로봇은 방향과 상태를 변경합니다. 그런 다음 다음 신호가 주어질 때까지 뒤로 이동하기 시작합니다. 손을 왼쪽으로 기울이면 다음 신호가 나올 때까지 로봇이 왼쪽으로 이동하고, 마찬가지로 오른쪽으로 손을 기울이면 오른쪽으로 이동합니다.
응용
그만큼 가속도계의 응용 기반 제스처 제어 로봇 포함
- 이 로봇은 로봇을 작동하기 위해 군사 애플리케이션에 사용됩니다.
- 이 로봇은 수술 목적의 의료 응용 분야에 사용됩니다.
- 이 로봇은 건설 현장에서 사용됩니다.
- 이러한 로봇 공학은 산업에서 트롤리 및 리프트를 제어하는 데 사용됩니다.
따라서 이것은 가속도계 기반 제스처 제어 로봇, 작동 및 응용 프로그램에 관한 것이므로이 개념을 더 잘 이해 하셨기를 바랍니다. 또한,이 개념 또는 전자 프로젝트 , 아래 댓글 섹션에 댓글을 달아 의견을 보내주세요. 여기에 질문이 있습니다. 가속도계 기반 제스처 제어 로봇의 응용 프로그램은 무엇입니까?
사진 크레딧 :
- 가속도계 기반 제스처 제어 로봇 ytimg
- 가속도계 static.flickr








{kind=link}
{kind=link}