전기 기계 전기 에너지를 변환 기계 에너지로 변환하는 것을 전기 모터라고합니다. 첫 번째이자 가장 중요한 전기 모터는 1740 년대 스코틀랜드의 수도사 Andrew Gordon이 만든 간단한 정전기 장치입니다. 그러나 1821 년에 Michael Faraday는 전기 에너지를 기계 에너지로 변환하는 것을 시연했습니다.
전기 모터는 주로 AC 모터와 DC 모터 . 다시 말하지만, 각 범주는 여러 유형으로 세분화됩니다. 믹서, 그라인더, 팬 등과 같은 많은 부하, 가장 많이 사용되는 가전 제품으로 다양한 유형의 모터를 찾을 수 있으며 모터의 속도 제어 제공을 통해 다양한 속도로 작동 할 수 있습니다. 이 기사에서는 주요 DC 모터 유형 중 하나, 즉 스테퍼 모터 및 제어 마이크로 컨트롤러를 사용합니다.
스테퍼 모터
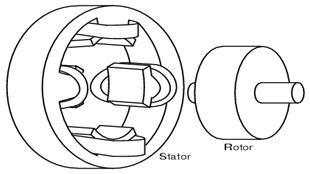
동기 및 브러시리스 DC 모터 전기 펄스를 기계적 운동으로 변환하여 각 단계 사이에 일정한 각도로 단계적으로 회전하여 완전한 회전을 완료하는 것을 스테퍼 모터라고합니다. 스테퍼 모터의 회전 단계 사이의 각도를 모터의 스테퍼 각도라고합니다.

스테퍼 모터
스테퍼 모터는 권선에 따라 유니 폴라 스테퍼 모터와 바이폴라 스테퍼 모터의 두 가지 유형으로 분류됩니다. 단극 스테퍼 모터는 바이폴라 스테퍼 모터에 비해 작동이 쉽기 때문에 많은 응용 분야에서 자주 사용됩니다. 그러나 영구 자석 스테퍼 모터, 가변 릴럭 턴스 스테퍼 모터 및 하이브리드 스테퍼 모터와 같은 다른 유형의 스테퍼 모터가 있습니다.
스테퍼 모터 제어
스테퍼 모터는 다양한 기술로 제어 할 수 있지만 여기서는 Atmega 마이크로 컨트롤러 . 89C51은 마이크로 컨트롤러입니다. 8051 마이크로 컨트롤러 제품군 .

스테퍼 모터 제어의 블록 다이어그램
8051 마이크로 컨트롤러를 사용하는 스테퍼 모터 제어의 블록 다이어그램은 전원 공급 , 마이크로 컨트롤러, 스테퍼 모터 및 제어 스위치 블록.
스테퍼 모터 제어 회로를 설계하는 2 가지 방법
스테퍼 모터 컨트롤러는 8051 마이크로 컨트롤러 사용 및 스테퍼 모터의 속도를 제어하기위한 스위칭 회로를 포함한다. 제어 스위치 회로는 다음을 사용하여 설계 할 수 있습니다. 트랜지스터 스위치 또는 트랜지스터 대신 ULN2003과 같은 스테퍼 모터 컨트롤러 IC를 사용합니다.
1. 스테퍼 모터 컨트롤러 IC를 이용한 제어 회로
단극 스테퍼 모터는 순차적으로 고정자 코일에 전원을 공급하여 회전 할 수 있습니다. 모터 코일 또는 리드에 적용되는 이러한 전압 신호의 시퀀스는 모터를 구동하기에 충분하므로 고정자 코일의 전류 방향을 제어하는 데 드라이버 회로가 필요하지 않습니다.

IC를 사용한 스테퍼 모터 제어
2 상 스테퍼 모터는 코일에 연결된 4 개의 끝 전선과 2 개의 상을 형성하기 위해 2 개의 끝 리드에 연결된 2 개의 공통 전선으로 구성됩니다. 두 위상의 공통점과 끝점은 각각 접지 또는 Vcc 및 마이크로 컨트롤러 핀에 연결됩니다. 모터를 회전하려면 두 단계의 끝점에 전원이 공급되어야합니다. 주로 전압은 phase1의 첫 번째 끝점에 적용되고 추가 전압은 phase2의 첫 번째 끝점에 적용됩니다.
스테퍼 모터는 웨이브 드라이브 스테핑 모드, 전체 드라이브 스테핑 모드 및 하프 드라이브 스테핑 모드와 같은 다양한 모드에서 작동 할 수 있습니다.
웨이브 드라이브 스테핑 모드
위의 순서를 반복함으로써 모터는 종점 선택에 따라 시계 방향 또는 시계 반대 방향으로 웨이브 구동 스테핑 모드로 회전 할 수 있습니다. 아래 표는 웨이브 드라이브 스테핑 모드의 신호 위상 시퀀스를 보여줍니다.


웨이브 드라이브 스테핑 모드
전체 드라이브 스테핑 모드
서로 다른 단계의 두 끝점에 전원을 공급하면 동시에 전체 드라이브 스테핑 모드가됩니다. 이 표는 풀 드라이브 스테핑 모드의 신호 위상 시퀀스를 보여줍니다.


전체 드라이브 스테핑 모드
하프 드라이브 스테핑 모드
웨이브 및 풀 드라이브 스테핑 모드의 단계 조합은 하프 드라이브 스테핑 모드를 달성합니다. 따라서이 모드에서는 스테핑 각도가 절반으로 나뉩니다. 이 표는 하프 드라이브 스테핑 모드의 신호 위상 시퀀스를 보여줍니다.


하프 드라이브 스테핑 모드
일반적으로 스테핑 각도는 스테퍼 모터의 해상도에 따라 다릅니다. 단계의 크기와 회전 방향은 입력 시퀀스의 수와 순서에 정비례합니다. 샤프트의 회전 속도는 입력 시퀀스의 주파수에 따라 다릅니다. 토크와 한 번에 자화되는 자석의 수는 비례합니다.
스테퍼 모터에는 60mA 전류가 필요하지만 Atmega 마이크로 컨트롤러 AT89C51의 최대 전류 정격은 50mA입니다. 따라서 스테퍼 모터 컨트롤러 IC는 신호 전송을 위해 스테퍼 모터와 마이크로 컨트롤러를 인터페이스하는 데 사용됩니다.
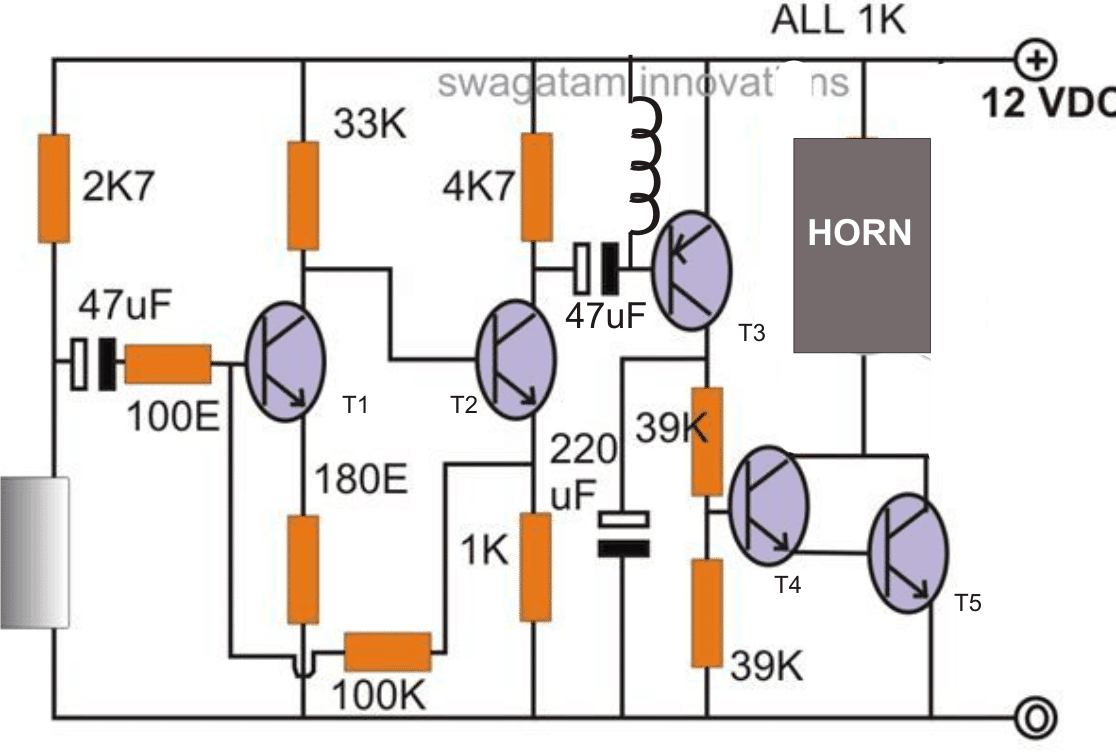
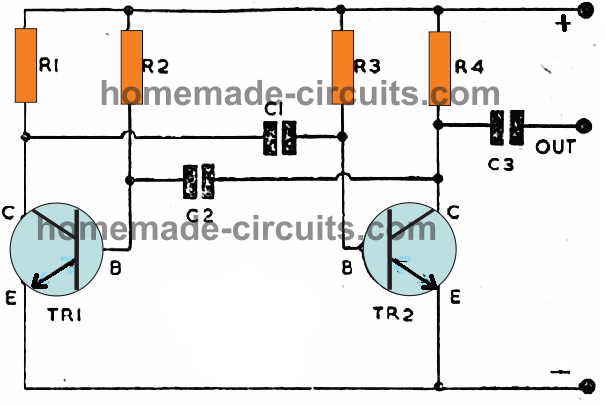
2. 트랜지스터를 이용한 제어 스위치 회로
강압 변압기를 사용하여 전압을 230V에서 7.5V로 강압하여 회로에 전원을 공급할 수 있습니다. 다이오드가있는 브리지 정류기로 정류 . 이 정류 된 출력은 필터 커패시터에 공급 된 다음 전압 조정기를 통과합니다. 5V 레귤레이션 출력은 전압 레귤레이터에서 얻습니다. 리셋 핀 9는 커패시터와 저항 사이에 연결됩니다.

트랜지스터를 이용한 스테퍼 모터 제어 회로
일반적으로 스테퍼 모터는 그림과 같이 4 개의 코일로 구성됩니다. 따라서 모터를 구동하려면 4 개의 모터 드라이버 회로가 필요합니다. 스테퍼 모터 컨트롤러 IC를 사용하여 모터를 구동하는 대신 마이크로 컨트롤러의 21, 22, 23 및 24 핀에서 각각 4 개의 트랜지스터가 드라이버 회로로 연결됩니다.
트랜지스터가 전도를 시작하면 코일 주위에 자기장이 생성되어 모터가 회전합니다. 스테퍼 모터 속도는 입력 펄스 주파수에 정비례합니다. 수정 발진기는 핀 18과 19에 연결되어 약 11.019MHz의 마이크로 컨트롤러 클록 주파수를 제공합니다.
모든 명령어의 실행 시간은 아래 공식을 사용하여 계산할 수 있습니다.
시간 = ((C * 12)) / f
여기서 C = 사이클 수
그리고 F = 크리스탈 주파수
태양 전지판을 회전시키기 위해 스테퍼 모터를 사용하는 애플리케이션 기반 회로 중 하나가 아래에 설명되어 있습니다.
프로그래밍 된 8051 마이크로 컨트롤러를 사용한 스테퍼 모터 제어
태양 추적 태양 전지판 프로젝트 태양 광 패널을 자동으로 조정하여 최대의 에너지를 생성하기위한 것입니다. 이 프로젝트에서는 8051 제품군의 프로그래밍 된 마이크로 컨트롤러에 의해 제어되는 스테퍼 모터가 태양 전지판에 인터페이스되어 태양 전지판의면이 항상 태양에 수직이되도록 유지합니다.

Edgefxkits.com의 마이크로 컨트롤러를 사용한 스테퍼 모터 제어
그만큼 프로그래밍 된 마이크로 컨트롤러 태양 전지판을 회전시키기 위해 스테퍼 모터에 일정한 간격으로 계단식 전기 펄스를 생성합니다. 컨트롤러가 모터의 전력 요구 사항을 제공 할 수 없기 때문에 드라이버 IC는 스테퍼 모터를 구동하는 데 사용됩니다.
아래 댓글 섹션에 댓글을 게시하여 제안, 피드백 및 질문을 남겨주세요. 이 기사와 관련하여 기술적으로 귀하를 돕기 위해 최선을 다할 것입니다. 전기 및 전자 프로젝트 개발 스테퍼 모터를 사용합니다.