

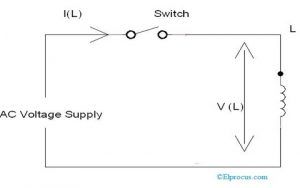
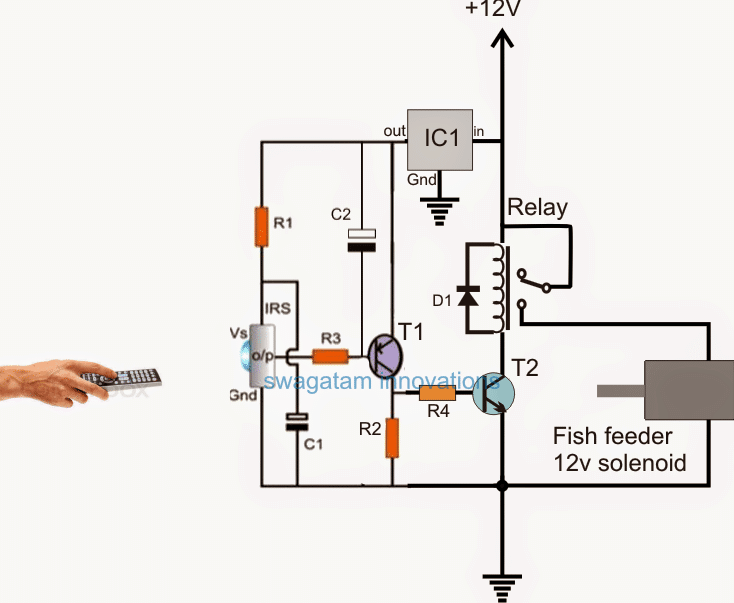
산업 자동화 및 제어
요즘 산업 자동화 시스템 많은 산업에서 인기를 얻었으며 여러 프로세스 관련 작업을 제어하는 데 중요한 역할을합니다. 공장이나 산업에 지리적으로 분포 된 다양한 산업 네트워크의 구현으로 인해 플로어 데이터 전송 및 제어 기능이 낮은 수준에서 높은 수준의 제어에 이르기까지 더욱 정교 해지고 쉬워졌습니다. 이러한 산업 네트워크는 CAN 프로토콜, Profibus, Modbus, Device net 등과 같은 다양한 통신 표준을 사용하는 다양한 필드 버스를 통해 라우팅됩니다. 따라서 산업 및 기타 자동화를 위해 CAN 통신이 어떻게 작동하는지 살펴 보겠습니다. 자동화 기반 시스템 .
산업 자동화 및 제어 소개
아래 그림은 전체 시스템을 자동화하기 위해 세 가지 수준의 제어가 수행되는 산업 자동화 및 제어 아키텍처를 보여줍니다. 이 세 가지 수준은 제어 및 자동화, 프로세스 제어 및 상위 제어입니다. 제어 및 자동화 수준은 프로세스 변수를 모니터링하고 제어하기위한 센서 및 액추에이터와 같은 다양한 필드 장치로 구성됩니다.

산업 자동화 아키텍처
Process Control Level은 다음과 같은 여러 제어 장치를 제어하고 유지 관리하는 중앙 컨트롤러입니다. 프로그래밍 가능 로직 컨트롤러 (PLC) , SCADA 및 SCADA와 같은 사용자 그래픽 인터페이스 HMI (Human Machine Interface) 이 수준에도 포함됩니다. Higher Order Control Level은 모든 비즈니스 관련 작업을 관리하는 엔터프라이즈 수준입니다.
위의 다이어그램과 각 레벨과 레벨 사이를 면밀히 관찰함으로써 Profibus 및 산업용 이더넷 정보를 교환하기 위해 연결된 것으로 보입니다. 따라서 통신 버스는 컨트롤러, 컴퓨터 및 필드 장치간에 안정적인 데이터 전송을위한 산업 자동화의 주요 구성 요소입니다.
제어 영역 네트워크 또는 CAN 프로토콜

OSI (Open Systems Interconnection) 모델
데이터 통신 한 지점에서 다른 지점으로 데이터를 전송하는 것입니다. 산업 통신을 지원하기 위해 국제 표준화기구는 다양한 노드 간의 데이터 전송을 제공하기위한 OSI (Open Systems Interconnection) 모델을 개발했습니다. 이 OSI 프로토콜 및 프레임 워크는 제조업체에 따라 다릅니다. CAN 프로토콜은 OSI 모델의 7 개 계층 중 하위 2 개 계층 즉, 물리적 및 데이터 링크 계층을 사용합니다.
컨트롤러 영역 네트워크 또는 CAN 프로토콜은 다중 마스터입니다. 직렬 통신 버스 , 독립적 인 컨트롤러의 네트워크입니다. CAN의 현재 버전은 1990 년부터 사용되어 왔으며 Bosch와 Intel에서 개발했습니다. 최대 1Mbps의 전송 속도를 제공하여 네트워크에 표시된 노드로 메시지를 브로드 캐스트합니다. 효과적인 전송을 위해 신뢰할 수있는 오류 감지 방법을 따르고 메시지 우선 순위 및 충돌 감지에 대한 중재를 위해 반송파 감지 다중 액세스 프로토콜을 사용합니다. 이러한 신뢰할 수있는 데이터 전송 특성으로 인해이 프로토콜은 버스, 자동차 및 기타 자동차 시스템, 공장 및 산업 자동화, 채광 응용 프로그램 등에 사용되었습니다.
CAN 데이터 전송
CAN 프로토콜 주소 기반 프로토콜이 아니라 메시지 지향 프로토콜이며 CAN에 내장 된 메시지는 전송되는 데이터의 내용과 우선 순위를 갖습니다. 버스에서 데이터를 수신 할 때 각 노드는 데이터를 버릴지 아니면 처리 할지를 결정합니다. 시스템에 따라 네트워크 메시지는 단일 노드 나 다른 여러 노드로 전송됩니다. CAN 통신은 특정 노드가 RTR (Remote Transmit Request)을 전송하여 다른 노드로부터 정보를 요청할 수 있도록합니다.

CAN 프로토콜 데이터 전송
우선 순위가 가장 높은 메시지를 전송하고 우선 순위가 낮은 메시지를 백업하고 대기함으로써 자동 중재없는 데이터 전송을 제공합니다. 이 프로토콜에서 우성은 논리 0이고 열성은 논리 1입니다. 한 노드가 열성 비트를 전송하고 다른 노드가 우성 비트를 전송하면 우성 비트가 승리합니다. 우선 순위 기반 중재 체계는 두 개 이상의 장치가 동시에 전송을 시작하는 경우 전송을 계속할 수있는 권한을 부여할지 여부를 결정합니다.
CAN 메시지 프레임
CAN 통신 네트워크는 다른 프레임 또는 메시지 형식으로 구성 될 수 있습니다.
- 표준 또는 기본 프레임 형식 또는 CAN 2.0 A
- 확장 프레임 형식 또는 CAN 2.0 B

표준 또는 기본 프레임 형식 또는 CAN 2.0 A
이 두 형식의 차이점은 비트 길이, 즉 기본 프레임은 식별자에 대해 11 비트 길이를 지원하는 반면 확장 프레임은 식별자에 대해 29 비트 길이를 지원한다는 것입니다. 11 비트 식별자. IDE 비트는 CAN 확장 프레임 형식과 CAN 기본 프레임 형식이 다릅니다. 여기서 IDE는 11 비트 프레임 케이스에서 우세하게 전송되고 29 비트 프레임 케이스에서 열성으로 전송됩니다. 확장 프레임 형식을 지원하는 일부 CAN 컨트롤러에서 기본 프레임 형식으로 메시지를 보내거나받을 수도 있습니다.

확장 프레임 형식 또는 CAN 2.0 B
CAN 프로토콜에는 데이터 프레임, 원격 프레임, 오류 프레임 및 과부하 프레임의 네 가지 유형의 프레임이 있습니다. 데이터 프레임은 전송 노드 데이터를 포함합니다. 원격 프레임은 특정 식별자를 요청합니다. 전송 오류 프레임은 노드 오류를 감지하고 시스템이 데이터 또는 원격 프레임 사이에 지연을 주입 할 때 과부하 프레임이 활성화됩니다. CAN 통신은 이론적으로 단일 네트워크에서 최대 2032 개의 장치를 연결할 수 있지만 실제로는 하드웨어 트랜시버로 인해 110 개의 노드로 제한됩니다. 전송 속도 250Kbps, 비트 전송률 10Kbps는 최대 길이 1km, 최단 길이는 1Mbps 인 40m로 최대 250m까지 케이블 연결을 지원합니다.
CAN 프로토콜을 사용한 산업 자동화 및 제어
이 프로젝트는 산업을 통제하기 위해 구현됩니다 공정의 온도 변화에 따라 DC 모터에 의해 실행되는 부하. 여러 공정 제어 시스템 온도에 따라 다릅니다. 교반기 탱크의 경우-특정 온도에 도달 한 후-교반기를 회전하려면 DC 모터를 켜야합니다. 따라서이 프로젝트는 매우 효율적이고 안정적인 저비용 통신 인 CAN 프로토콜을 사용하여이를 달성합니다.
이 프로젝트에서는 두 개의 마이크로 컨트롤러가 사용됩니다. 하나는 온도 데이터 수집 용이고 다른 하나는 DC 모터 제어 . CAN 컨트롤러 MCP2515 및 CAN 트랜시버 MCP2551은 데이터 교환을위한 CAN 통신을 구현하기 위해 두 마이크로 컨트롤러에 연결됩니다.

CAN 프로토콜을 사용한 산업 자동화 및 제어
송신 측 마이크로 컨트롤러는 LM35를 사용하여 온도를 지속적으로 모니터링합니다. 온도 센서 ADC가 부착 된 아날로그 값을 디지털로 변환합니다. 이러한 값은 마이크로 컨트롤러에 프로그래밍 된 설정 값과 비교되며 마이크로 컨트롤러가 전송하거나 전송하면 이러한 값이 위반됩니다. 데이터를 수신자에게 전송 CAN 컨트롤러 및 트랜시버 장치에 의한 측면 마이크로 컨트롤러.
수신 측 CAN 통신은 데이터를 수신하여 데이터를 추가로 처리하고 모터 드라이버 IC에 의해 DC 모터를 제어하는 마이크로 컨트롤러로 전송합니다. 마이크로 컨트롤러로 제어되는 드라이버 IC로 모터의 방향을 변경할 수도 있습니다.
따라서 CAN 프로토콜은 산업 환경에서 서로 다른 노드를 연결하여 P2P 통신을 가능하게합니다. 이러한 유형의 통신은 다른 가정이나 건물과 같은 자동화 시스템 , 공장 등.이 기사가 CAN 통신을 통한 산업 자동화에 대한 더 나은 이해를 얻었기를 바랍니다. 추가 정보 및 문의 사항이 있으시면 편지를 보내주십시오.
사진 크레딧 :






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}