
죽음은 피할 수없는 것입니다. 하지만 도로에서 발생한 사고 나 더 심각한 부상으로 인한 갑작스런 죽음은 어떨까요? 사람의 생명을 영원히 망칠 수있는 부상입니다. 생각 만해도 척추가 떨리지 않나요? 사고의 주된 이유는 무엇입니까? 물론 무모한 운전과 특히 높은 도로와 같은 부드러운 도로에서 차량의 급한 운전.
통계 보고서에 따르면 2005-2009 년 기간 동안 약 1200 명이 발진 운전으로 인한 사고로 사망했습니다. 또한 거의 매일 발진 운전자로 인한 사고 소식을들을 수 있습니다.
그래서, 그것을 막을 방법이 있습니까? 물론이야!
좋은 운전자가되고 교통 규칙을 따르고 정상적인 속도를 유지하는 등 여러 가지 방법이있을 수 있습니다. 그러나 한 가지 중요한 방법이 있습니다. 그것은 차량의 속도를 감시하고 이에 따라이를 모니터링하는 것입니다.
이것은 차량의 속도를 확인하는 방법을 고안하여 기술적으로 수행 할 수 있습니다.
속도를 확인하는 2 가지 방법 :
- 도로 측 또는 도로 중앙에 속도 센서 설치 .
- 비디오 이미지 프로세서 통합 : 길가의 기둥에 설치된 카메라로 구성되어 있으며, 연속적인 프레임으로 빠르게 영상을 촬영하여 상황을 지속적으로 모니터링합니다. 트래픽 흐름 매개 변수는 신호 프로세서에서 그에 따라 분석 및 처리됩니다.

비디오 카메라로 교통 모니터링을 보여주는 이미지
- 차선에 RADAR 통합 :RADAR은 마이크로파 대역의 신호를 차량으로 보내고 반사 된 신호의 주파수 변화를 분석하여 차량의 속도를 확인하는 데 사용할 수 있습니다. RADAR는 Radio Detection and Ranging을 의미합니다. 전송 된 신호는 주파수가 일정하거나 주파수가 변경되는 신호일 수 있습니다. 일반적으로 CW 도플러 레이더는 도로변의 기둥에 배치됩니다.

RADAR를 사용한 속도 감지
- IR 센서 설치 : IR LED와 포토 다이오드가 결합 된 IR 센서를 사용하여 차량이 이동하는 거리를 모니터링하고 동시에 속도를 계산할 수 있습니다. 기본 아이디어는 한 쌍의 IR LED와 포토 다이오드를 도로 양쪽에 빈번한 간격으로 배치하고 차량이 IR LED와 포토 다이오드 사이의 경로 중단을 모니터링하는 것입니다.
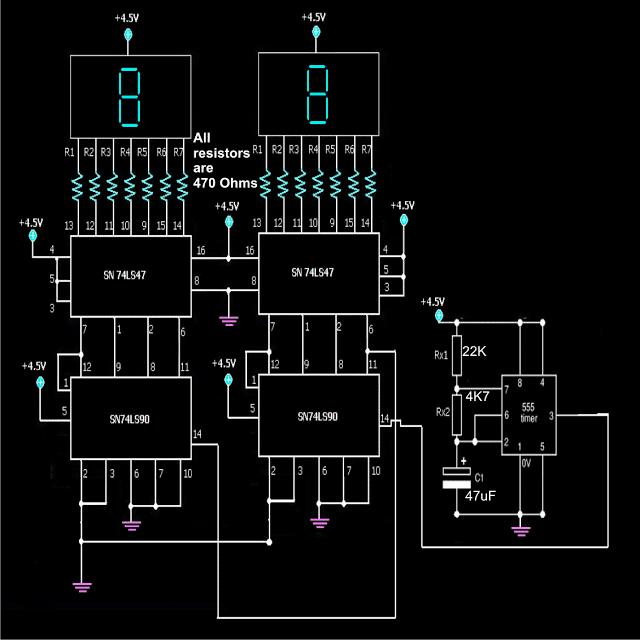
다음은 위 방법의 간단한 프로토 타입입니다. 샘플 프로토 타입은 두 쌍의 IRLED- 포토 다이오드로 작동합니다.

적외선 센서를 이용한 속도 체크 프로토 타입 회로 Edgefx 키트
다음 섹션으로 구성됩니다.
- 차량을 감지하는 포토 다이오드-LED 쌍
- 차량이 두 개의 포토 다이오드 LED 쌍 사이의 경로를 통과하는 데 걸린 시간을 계산하고 표시하는 카운터입니다.
- 속도가 설정된 한계를 초과하는지 나타내는 부저입니다.
- 적절한 타이밍에 신호를 제공하는 타이머 IC.
- LIDAR 총 사용 : LIDAR는 레이저 기반 탐지 및 거리 측정 시스템입니다. 교통 경찰관은 짧은 적외선 빛을 발산하는 휴대용 LIDAR 총을 휴대 할 수 있으며,이 빛이 움직이는 차량에 의해 반사됨에 따라 총은 반사 된 신호에 걸린 시간을 2로 나누어 측정합니다. 거리. 속도는 샘플 수를 몇 초의 고정 시간으로 나누어 측정합니다. 전파 대신 광파를 사용한다는 점을 제외하면 RADAR 시스템과 유사하게 작동합니다.

교통 경찰관의 손에 라이다 총
IR 센서를 사용한 속도 검사기 시스템 작동

IR 센서를 사용한 속도 검사기 시스템의 작동을 보여주는 블록 다이어그램 Edgefx 키트
차량이 첫 번째 IRLED- 포토 다이오드 쌍 사이의 경로를 통과하면 빛의 길을 차단하고 포토 다이오드 저항이 증가하여 타이머 IC1에 해당하는 낮은 신호 출력이 발생합니다. 타이머 IC1은 10ms의 고정 기간 동안 출력에서 높은 신호를 생성합니다. 정상적인 조건에서 정상 속도에서는 2 개 사이의 경로가 중단되지 않습니다.nd포토 다이오드 -IR LED 쌍과 타이머 IC2에 대한 해당 입력이 높아져 출력에서 낮은 논리 신호가 발생합니다. 두 타이머의 출력은 타이머 IC3의 입력에 연결된 높은 출력 (낮은 입력과 높은 입력의 경우)을 제공하는 NAND 게이트 2m에 연결됩니다. 타이머 IC의 해당 출력이 낮아 부저가 꺼진 상태가됩니다. 동시에 타이머 IC1의 출력은 NAND gate1의 두 입력 모두에 제공되며, 이는 타이머 IC5의 리셋 핀에 연결된 타이머 IC4에 높은 논리 출력을 제공하기 위해 낮은 논리 출력을 제공합니다. 타이머 IC5의 출력은 그에 따라 높고 카운터 IC에 높은 펄스를 제공합니다. 카운터 섹션은 여러 자리 수를 읽는 4 단계 10 년 카운터로 구성됩니다. 각 카운터 IC 클록은 이전 카운터 IC의 클록 출력에 연결됩니다. 카운터는 클럭 펄스의 각 상승 에지에서 카운트를 증가시킵니다.
이제 차량이 타이머 IC1에 설정된 시간 동안 두 번째 IRLED- 포토 다이오드 쌍 사이의 경로에 도달 할 정도로 고속으로 이동한다고 가정합니다. 따라서 이제 카운터는 일반 카운트보다 낮은 카운트를 표시하고 동시에 NAND gate2가 두 입력 모두에서 하이가되고 출력이 낮아지고 이에 따라 타이머 IC3가 로우 입력을 수신하여 하이 로직 출력을 제공하고 그에 따라 부저 알람을 트리거합니다.
따라서 카운터 판독 값으로 나눈 두 쌍 사이의 거리는 차량의 속도를 제공하며이 속도가 주어진 제한을 증가 시키면 부저가 울려 속도 제한을 위반했음을 분명하게 표시합니다.
방법 중 하나에 대해 자세히 설명했습니다. 다른 방법은 피드백으로 환영합니다.
사진 크레딧 :
- LIDAR 총을 들고 교통 경찰관 위키 미디어





{kind=link}